Pubblico il video delle prove effettuate ieri su una nuova feature del mio programma WEController.
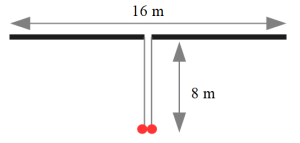
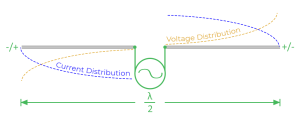
Questa nuova funzione gestisce il movimento in automatico di un motore stepper che connesso meccanicamente ad un condensatore variabile di un loop magnetico, accorda l’antenna sulla frequenza impostata dal VFO della radio.
Nel video, che effettivamente non è proprio ad alta qualità, si possono notare tre schermate:
- In alto a sx: Ham Radio Deluxe. Serve per connettere la radio a WEController: tramite questo software WEC legge la frequenza del ricetrasmettitore (un IC737 per la prova) ed effettua i calcoli per spostare il motore stepper.
- In alto a dx: schermata del software del miniVNA. Questa schermata mi consente in tempo reale di controllare effettivamente la frequenza centrale di risonanza del loop ad ogni movimento di motore.
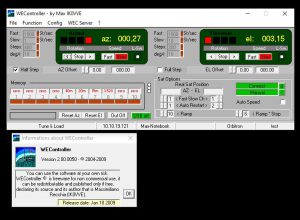
- In basso a sx: Schermata di WEController. Anche se non è molto chiara si può vedere che ad ogni movimento di motore 4 lucine rosse (corrispondenti alle 4 uscite che pilotano il motore) si accendono in sequenza.
Una volta messo il sistema in automatico, ad ogni movimento del VFO della radio WEController effettuerà dei calcoli e deciderà se sarà necessario spostare il motorino per variare l’accordo.
Come si vedrà dal video (magari mettete in pausa!) la frequenza con più basso ROS letta dal miniVNA corrisponderà in modo abbastanza preciso con quella impostata da WEController.
Sono graditi commenti e suggerimenti.
Buona visione!!
English Version
In the folowing video you find the first tests carried with my program WEController.
This new feature manages automatically a stepper motor which maybe connected to a variable capacitor of a magnetic loop, tuning the loop’s variable capacitor exactly on the frequncy on which the VFO stays via the CAT commands.
Even if the video is not of good quality you can see 3 main windows:
- Upper Left: HRD is used to get WeController to be connected via that program by reading its frequency. In my test I use an IC737, and WeCon makes the calculations to put the stepper on the right position.
- Upper Right : MiniVNA analyzer is used to check in real time the resonating frequency of the loop and the movement of its variable capacitor.
- Lower Left : WeController window. Even if the video is not very clear (I will do a better one in the future) is possible to have a visual indication of the stepper motor rotating via 4 red leds.
The video begons with the memorizing of the band segments on the 30 meters, going ahead on 20 mt . The more points are memorized per band the more precise will be the Variable capacitor position on each band segment.
Once all the band segments are set it will suffice that the VFO is put on that band and the program memories will put the loop on the right positions.